

Juhtimisklassi kiibi tutvustus
Juhtkiip viitab peamiselt mikrokontrollerile (MCU), st mikrokontrollerile, mida tuntakse ka ühe kiibina, mis vähendab protsessori sagedust ja spetsifikatsioone vastavalt ning mälu, taimeri, analoog-digitaalteisenduse, kella, sisend-/väljundpordi ja jadapordi ning muud funktsionaalsed moodulid ja liidesed on integreeritud ühele kiibile. Terminali juhtimisfunktsiooni realiseerimisel on sellel eelised, nagu kõrge jõudlus, madal energiatarve, programmeeritavus ja suur paindlikkus.
Sõiduki gabariidi taseme MCU diagramm
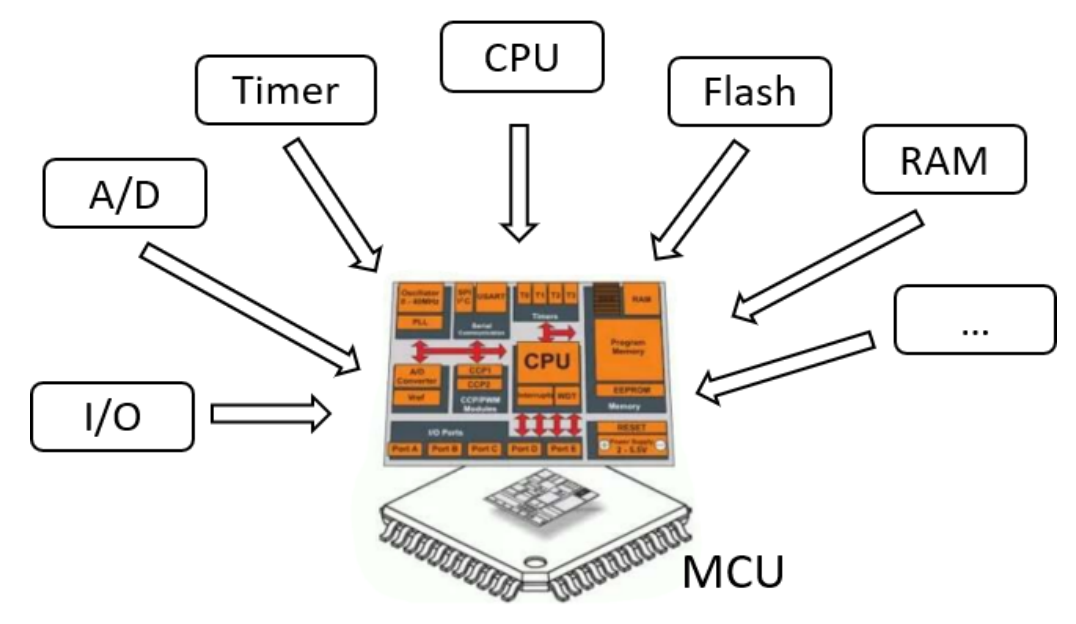
Autotööstus on MCU väga oluline rakendusvaldkond. IC Insightsi andmete kohaselt moodustas 2019. aastal autoelektroonikas MCU ülemaailmne rakendus umbes 33%. Iga auto tippmudelis kasutab MCU-sid ligi 100, alates juhtarvutitest ja LCD-näidikutest kuni mootorite, šassii ja auto suurte ning väikeste komponentideni, mis vajavad MCU juhtimist.
Algusaastatel kasutati autodes peamiselt 8- ja 16-bitiseid MCUS-e, kuid autode elektroniseerimise ja intelligentsuse pideva täiustumisega suureneb ka vajalike MCUS-ide arv ja kvaliteet. Praegu on 32-bitiste MCUS-ide osakaal autotööstuse MCUS-ides jõudnud umbes 60%-ni, millest ARM-i Cortex-seeria tuum on oma madala hinna ja suurepärase võimsuse juhtimise tõttu autotööstuse MCU-tootjate peamine valik.
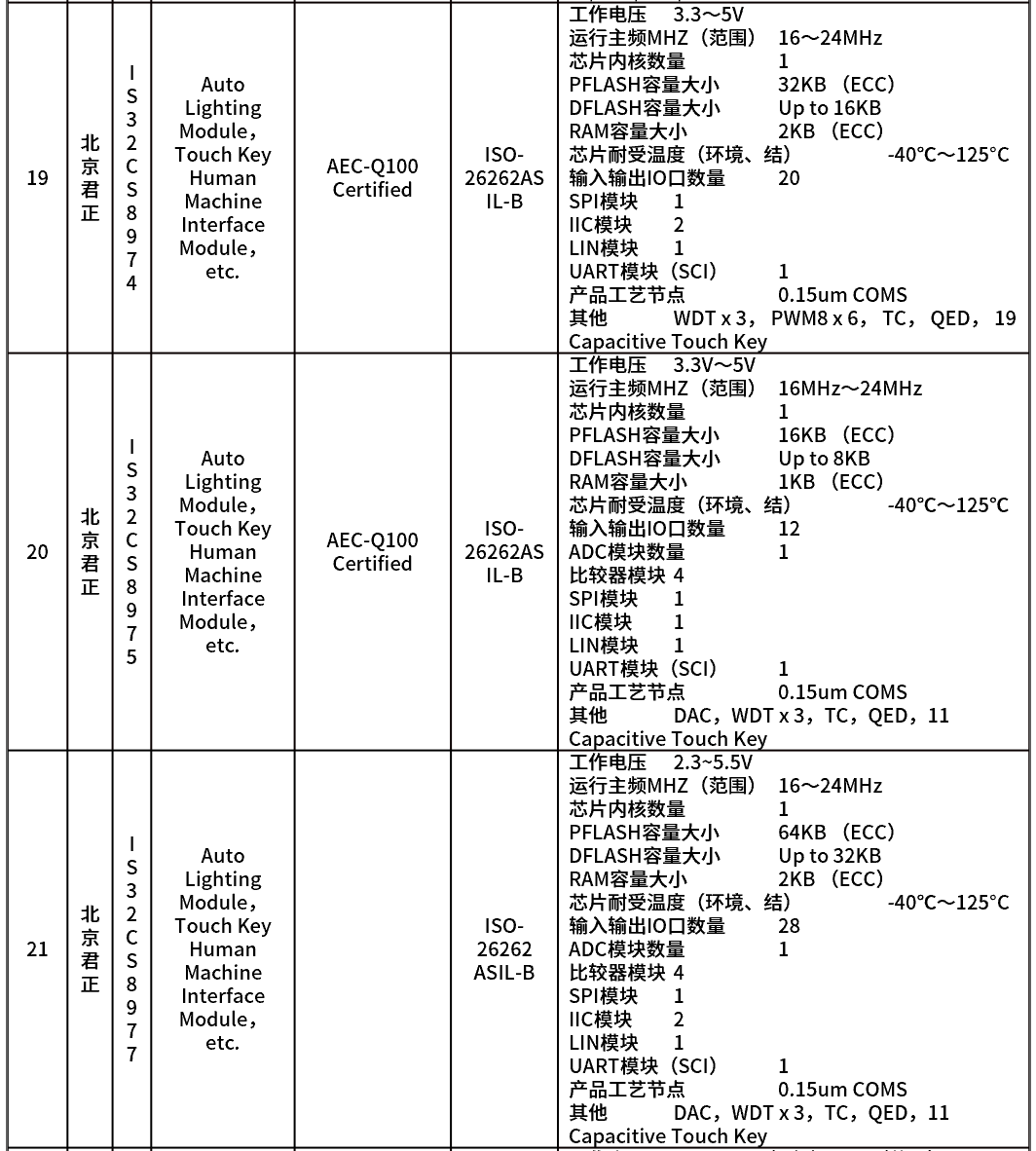
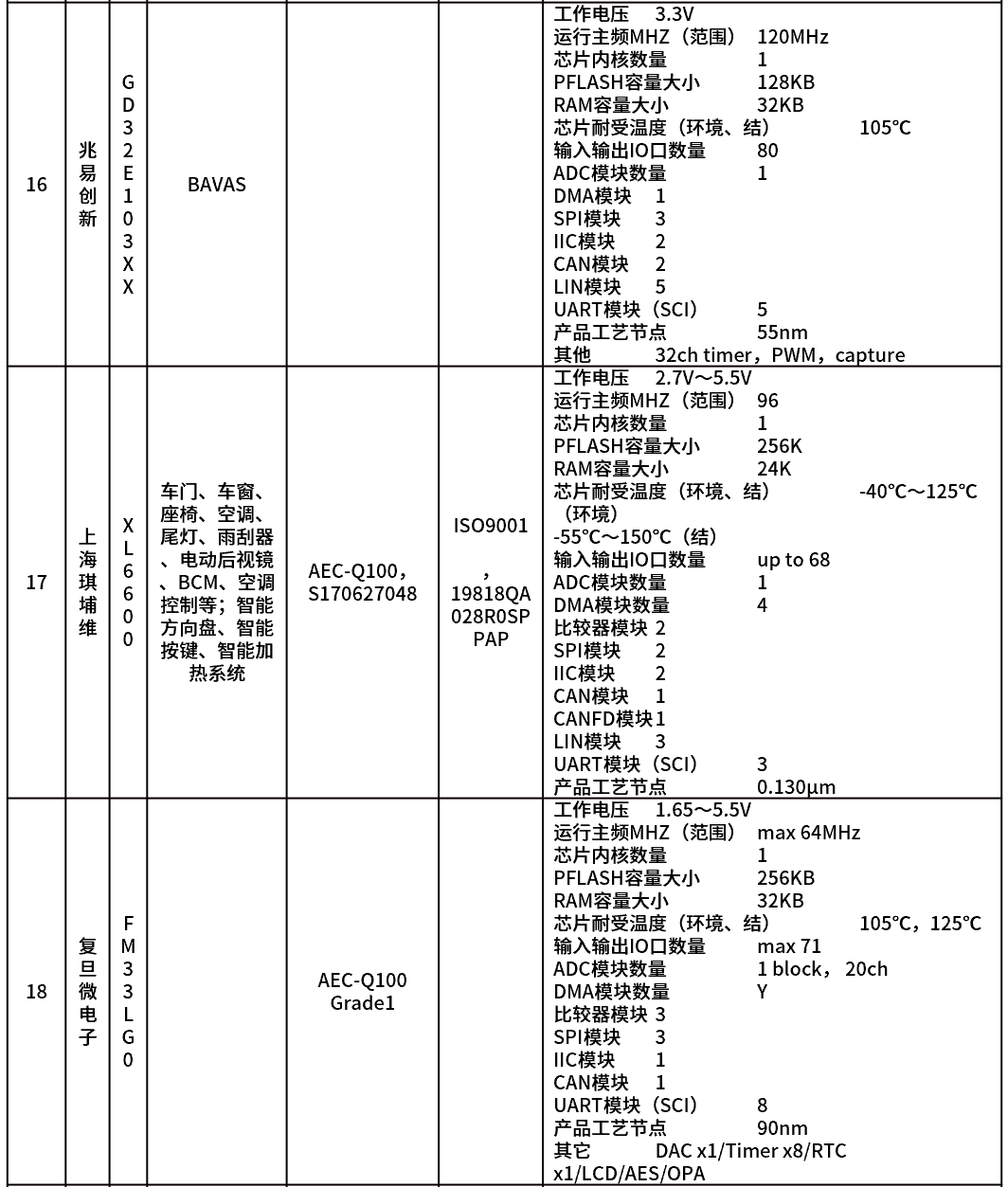
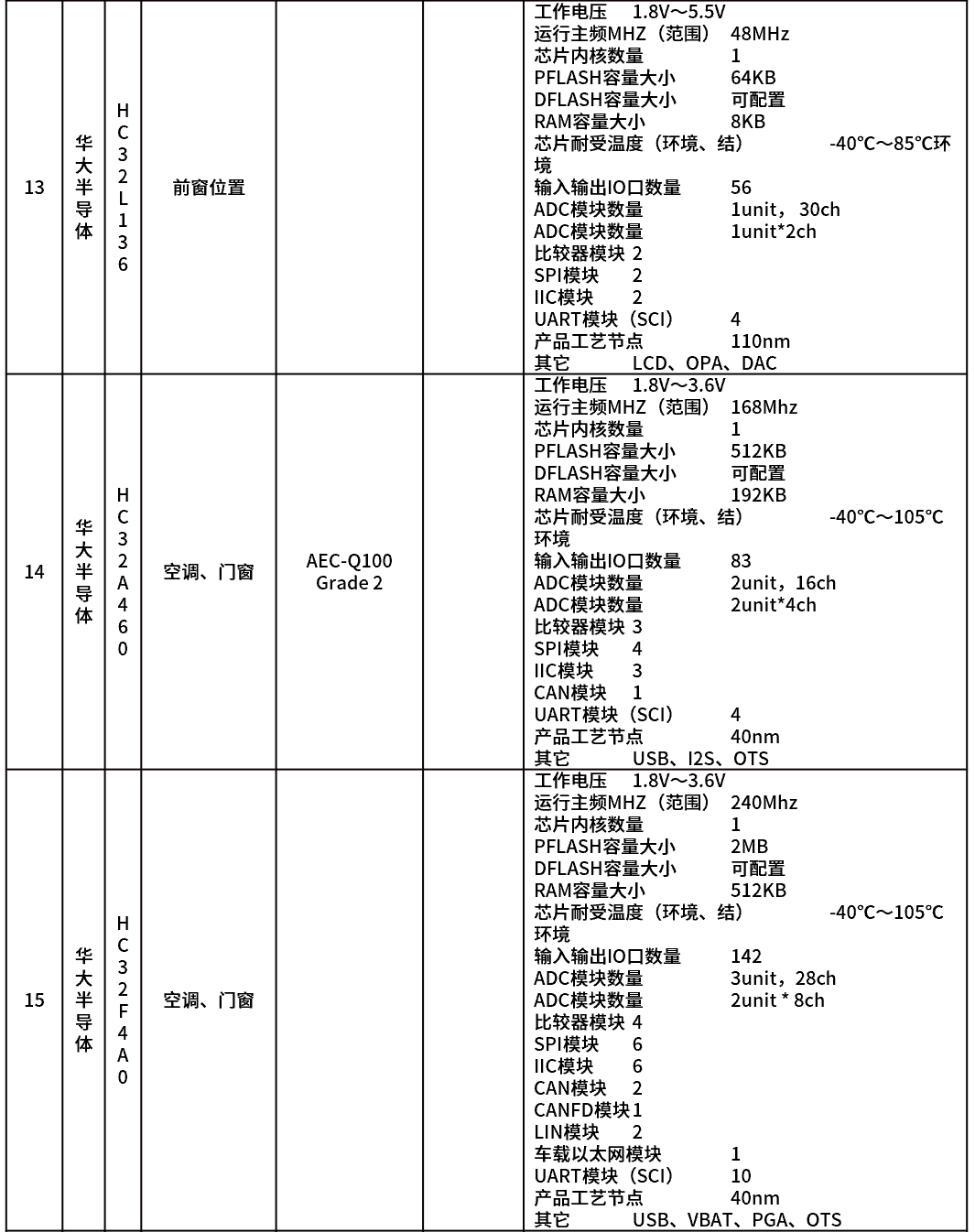
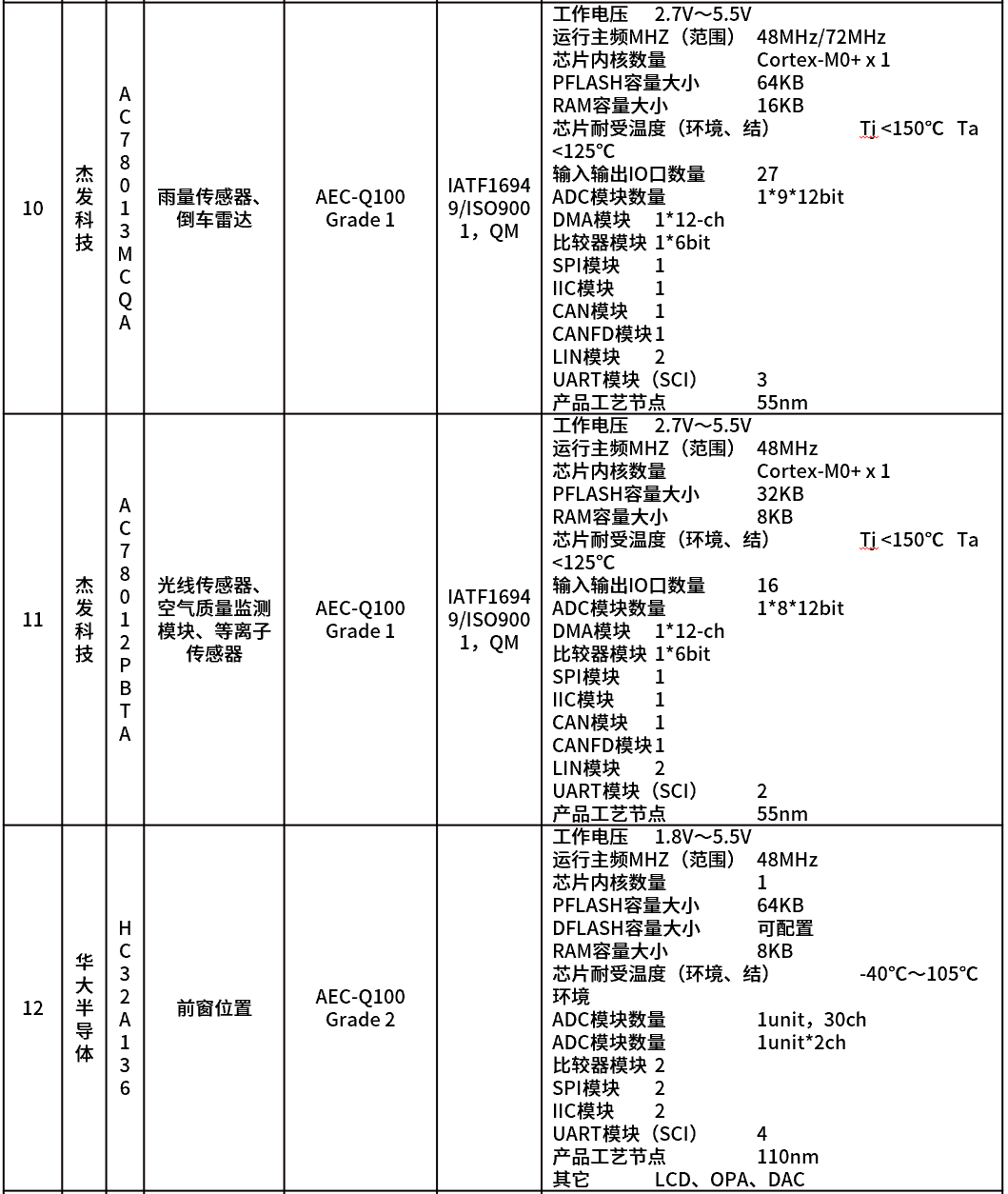
Autotööstuse mikrokontrollerite peamised parameetrid hõlmavad tööpinget, töösagedust, välkmälu ja muutmälu mahtu, taimeri moodulit ja kanali numbrit, analoog-digimuunduri moodulit ja kanali numbrit, jadapordi liidese tüüpi ja numbrit, sisend- ja väljundportide numbrit, töötemperatuuri, korpuse vormi ja funktsionaalset ohutustaset.
Protsessori bittide järgi jagatuna saab autotööstuse MCUS-i peamiselt jagada 8-, 16- ja 32-bitisteks. Protsessi täiustamisega langeb 32-bitise MCUS-i hind jätkuvalt ning see on nüüdseks muutunud peavooluks ja asendab järk-järgult rakendusi ja turge, kus varem domineerisid 8/16-bitised MCUS-id.
Rakendusvaldkonna järgi jaotades saab autotööstuse mikrokontrollereid jagada kere valdkonnaks, toitevaldkonnaks, šassii valdkonnaks, kokpiti valdkonnaks ja intelligentse ajami valdkonnaks. Kokpiti valdkonna ja intelligentse ajami valdkonna jaoks vajab mikrokontroller suurt arvutusvõimsust ja kiireid väliseid sideliideseid, näiteks CAN FD ja Ethernet. Kere valdkond vajab samuti suurt hulka väliseid sideliideseid, kuid mikrokontrolleri arvutusvõimsuse nõuded on suhteliselt madalad, samas kui toitevaldkond ja šassii valdkond nõuavad kõrgemat töötemperatuuri ja funktsionaalset ohutustaset.
Šassii domeeni juhtimiskiip
Šassii valdkond on seotud sõiduki juhtimisega ning koosneb ülekandesüsteemist, ajamisüsteemist, roolisüsteemist ja pidurisüsteemist. See koosneb viiest alamsüsteemist: roolimine, pidurdamine, käiguvahetus, drossel ja vedrustus. Autode intelligentsuse arenguga on šassii valdkonna põhisüsteemideks saanud taju äratundmine, otsuste planeerimine ja juhtimise teostamine intelligentsetes sõidukites. Roolimine juhtme abil ja juhtmevaba juhtimine on automaatjuhtimise täidesaatva poole põhikomponendid.
(1) Töönõuded
Šassii valdkonna ECU kasutab suure jõudlusega, skaleeritavat funktsionaalse ohutuse platvormi ning toetab andurite klasterdamist ja mitmeteljelisi inertsiaalandureid. Selle rakendusstsenaariumi põhjal pakutakse šassii valdkonna MCU-le välja järgmised nõuded:
· Kõrge sageduse ja suure arvutusvõimsuse nõuded, põhisagedus ei ole väiksem kui 200 MHz ja arvutusvõimsus ei ole väiksem kui 300 DMIPS
· Välkmälu ruum on vähemalt 2 MB, koos koodivälkmälu ja andmetega välkmälu füüsilise partitsiooniga;
· RAM vähemalt 512KB;
· Kõrged funktsionaalse ohutuse taseme nõuded, võib ulatuda ASIL-D tasemeni;
· Toetab 12-bitist täppis-ADC-d;
· Toetab 32-bitist suure täpsusega ja kõrge sünkroniseerimise taimerit;
· Toetab mitmekanalilist CAN-FD-d;
· Toetab vähemalt 100M Etherneti;
· Usaldusväärsus mitte madalam kui AEC-Q100 Grade1;
· Toetab veebipõhist uuendamist (OTA);
· Toetab püsivara kontrollimise funktsiooni (riigisalajane algoritm);
(2) Toimivusnõuded
· Tuuma osa:
I. Tuuma sagedus: see tähendab kella sagedust kerneli töötamise ajal, mida kasutatakse kerneli digitaalse impulssignaali võnkumise kiiruse esitamiseks ja põhisagedus ei saa otseselt esindada kerneli arvutuskiirust. Kerneli töökiirus on seotud ka kerneli torujuhtme, vahemälu, käskude komplektiga jne.
II. Arvutusvõimsus: DMIPS-i saab tavaliselt hindamiseks kasutada. DMIPS on ühik, mis mõõdab mikrokontrolleri integreeritud võrdlusprogrammi suhtelist jõudlust selle testimise ajal.
· Mälu parameetrid:
I. Koodimälu: mälu, mida kasutatakse koodi salvestamiseks;
II. Andmemälu: mälu, mida kasutatakse andmete salvestamiseks;
III.RAM: Mälu, mida kasutatakse ajutiste andmete ja koodi salvestamiseks.
· Sidebuss: sealhulgas autode spetsiaalbuss ja tavapärane sidebuss;
· Ülitäpsed välisseadmed;
· Töötemperatuur;
(3) Tööstuslik muster
Kuna eri autotootjate kasutatav elektriline ja elektrooniline arhitektuur on erinev, on ka šassii valdkonna komponentide nõuded erinevad. Sama autotehase eri mudelite erineva konfiguratsiooni tõttu on ka šassii piirkonna ECU valik erinev. Need erinevused tingivad šassii valdkonna erinevad MCU nõuded. Näiteks Honda Accord kasutab kolme šassii valdkonna MCU kiipi ja Audi Q7 umbes 11 šassii valdkonna MCU kiipi. 2021. aastal oli Hiina kaubamärkide sõiduautode toodang umbes 10 miljonit, millest jalgratta šassii valdkonna MCUS-ide keskmine nõudlus on 5 ja koguturg on ulatunud umbes 50 miljonini. Šassii valdkonna MCUS-ide peamised tarnijad on Infineon, NXP, Renesas, Microchip, TI ja ST. Need viis rahvusvahelist pooljuhtide müüjat moodustavad üle 99% šassii valdkonna MCUS-ide turust.
(4) Tööstuslikud tõkked
Peamisest tehnilisest vaatepunktist on šassii komponendid, nagu EPS, EPB ja ESC, tihedalt seotud juhi eluohutusega, seega on šassii valdkonna mikrokontrolleri funktsionaalse ohutuse tase väga kõrge, põhimõtteliselt ASIL-D taseme nõuded. See mikrokontrolleri funktsionaalse ohutuse tase Hiinas puudub. Lisaks funktsionaalsele ohutustasemele on šassii komponentide rakendusstsenaariumidel väga kõrged nõuded mikrokontrolleri sagedusele, arvutusvõimsusele, mälumahule, välisseadmete jõudlusele, välisseadmete täpsusele ja muudele aspektidele. Šassii valdkonna mikrokontroller on moodustanud väga kõrge tööstusbarjääri, millele kodumaised mikrokontrolleri tootjad peavad vastu astuma ja selle murdma.
Tarneahela osas on šassii domeenikomponentide juhtkiibi kõrge sageduse ja suure arvutusvõimsuse nõuete tõttu esitatud kiipide tootmisprotsessile ja -protsessile suhteliselt kõrged nõuded. Praegu näib, et MCU sagedusnõuete täitmiseks üle 200 MHz on vaja vähemalt 55 nm protsessi. Sellega seoses pole kodumaine MCU tootmisliin veel täielik ega ole jõudnud masstootmise tasemele. Rahvusvahelised pooljuhtide tootjad on kiipide valukodade osas põhimõtteliselt omaks võtnud IDM-mudeli, praegu on vastavad võimalused ainult TSMC-l, UMC-l ja GF-il. Kodumaised kiibitootjad on kõik Fabless ettevõtted ning kiipide tootmisel ja võimsuse tagamisel on väljakutseid ja teatud riske.
Põhilistes andmetöötlusstsenaariumides, nagu autonoomne juhtimine, on traditsioonilisi üldotstarbelisi protsessoreid nende madala arvutustõhususe tõttu raske tehisintellekti arvutusnõuetega kohaneda ning tehisintellekti kiipidel, nagu GPU-d, FPGA-d ja ASIC-id, on suurepärane jõudlus nii servas kui ka pilves, neil on oma omadused ja neid kasutatakse laialdaselt. Tehnoloogiatrendide seisukohast jääb GPU lühiajaliselt domineerivaks tehisintellekti kiibiks ja pikas perspektiivis on ASIC lõplik suund. Turutrendide seisukohast säilitab tehisintellekti kiipide ülemaailmne nõudlus kiire kasvutempo ning pilve- ja servakiipidel on suurem kasvupotentsiaal ja turu kasvumäär peaks järgmise viie aasta jooksul olema ligi 50%. Kuigi kodumaise kiibitehnoloogia alus on nõrk, loob tehisintellekti rakenduste kiire maandumisega tehisintellekti kiibi kiire nõudlus võimalusi kohalike kiibiettevõtete tehnoloogia ja võimekuse kasvuks. Autonoomsel juhtimisel on arvutusvõimsuse, viivituse ja töökindluse osas ranged nõuded. Praegu kasutatakse enamasti GPU + FPGA lahendusi. Algoritmide stabiilsuse ja andmepõhise lähenemisega eeldatakse, et ASIC-id võidavad turul ruumi.
Harude ennustamiseks ja optimeerimiseks on protsessori kiibil vaja palju ruumi, salvestades erinevaid olekuid ja vähendades ülesannete vahetamise latentsust. See muudab selle sobivamaks ka loogika juhtimiseks, jadaoperatsioonideks ja üldiste andmetöötlustoimingute jaoks. Võtke näiteks graafikaprotsessor ja protsessor. Võrreldes protsessoriga kasutab graafikaprotsessor suurt hulka arvutusüksusi ja pikka torujuhet, ainult väga lihtsat juhtimisloogikat ja vahemälu pole vaja. Protsessor mitte ainult ei hõiva palju vahemälu ruumi, vaid sellel on ka keerukas juhtimisloogika ja palju optimeerimisahelaid, mis moodustab arvutusvõimsusega võrreldes vaid väikese osa.
Toitedomeeni juhtimiskiip
Toitedomeeni kontroller on intelligentne jõuülekande haldusüksus. CAN/FLEXRAY abil saab hallata käigukasti, akut ja jälgida generaatori reguleerimist ning seda kasutatakse peamiselt jõuülekande optimeerimiseks ja juhtimiseks, lisaks on sellel nii elektriline intelligentne rikete diagnoosimine, intelligentne energiasääst, siinikommunikatsioon ja muud funktsioonid.
(1) Töönõuded
Toitevaldkonna juhtimise mikrokontroller toetab peamisi energiarakendusi, näiteks hoonete juhtimissüsteemi (BMS), järgmiste nõuetega:
· Kõrge põhisagedus, põhisagedus 600MHz~800MHz
· 4 MB muutmälu
· Kõrged funktsionaalse ohutuse taseme nõuded, võib ulatuda ASIL-D tasemeni;
· Toetab mitmekanalilist CAN-FD-d;
· Toetab 2G Etherneti;
· Usaldusväärsus mitte madalam kui AEC-Q100 Grade1;
· Toetab püsivara kontrollimise funktsiooni (riigisalajane algoritm);
(2) Toimivusnõuded
Suur jõudlus: Toode integreerib ARM Cortex R5 kahetuumalise lukustusastmelise protsessori ja 4 MB kiibil oleva SRAM-i, et toetada autotööstuse rakenduste kasvavaid arvutusvõimsuse ja mäluvajadusi. ARM Cortex-R5F protsessor kuni 800 MHz. Kõrge ohutus: Sõiduki spetsifikatsiooni töökindluse standard AEC-Q100 vastab 1. astmele ja ISO26262 funktsionaalse ohutuse tase ASIL D-le. Kahetuumaline lukustusastmeline protsessor saavutab kuni 99% diagnostilise katvuse. Sisseehitatud infoturbe moodul integreerib tõelise juhuslike arvude generaatori, AES, RSA, ECC, SHA ja riistvarakiirendid, mis vastavad asjakohastele riiklikele ja ettevõtete turvalisuse standarditele. Nende infoturbe funktsioonide integreerimine suudab rahuldada selliste rakenduste vajadusi nagu turvaline käivitamine, turvaline side, turvaline püsivara värskendamine ja täiendamine.
Kehapiirkonna kontrollkiip
Kereosa vastutab peamiselt kere erinevate funktsioonide juhtimise eest. Sõidukite arenguga on ka kereosa kontrollerid üha enam kasutusel. Kontrolleri maksumuse ja sõiduki kaalu vähendamiseks on vaja integreerida kõik funktsionaalsed seadmed, alates auto esiosast, keskosast kuni tagaosani, näiteks tagumine piduritule, tagumine gabariidituli, tagaukse lukk ja isegi topelttugivarras, üheks terviklikuks kontrolleriks.
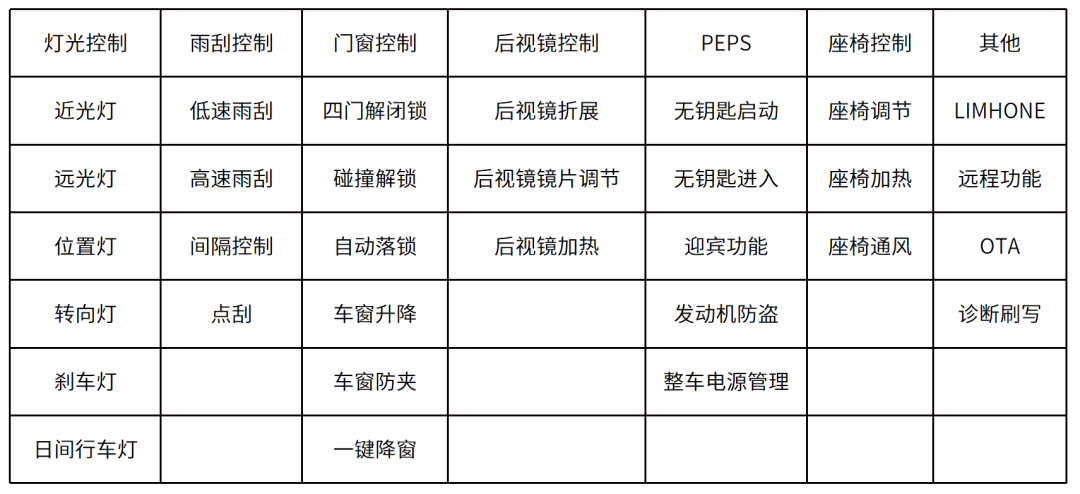
Kerepinna kontroller integreerib üldiselt BCM-i, PEPS-i, TPMS-i, Gateway ja muid funktsioone, kuid see võib laiendada ka istme reguleerimist, tahavaatepeegli juhtimist, kliimaseadme juhtimist ja muid funktsioone, iga ajami terviklikku ja ühtset haldamist ning süsteemi ressursside mõistlikku ja tõhusat jaotamist. Kerepinna kontrolleril on arvukalt funktsioone, nagu allpool näidatud, kuid need ei piirdu siin loetletutega.
(1) Töönõuded
Autoelektroonika peamised nõudmised MCU juhtkiipide osas on parem stabiilsus, töökindlus, turvalisus, reaalajas ja muud tehnilised omadused, samuti suurem arvutusvõimsus ja salvestusmaht ning madalamad energiatarbimise indeksi nõuded. Kerepiirkonna kontroller on järk-järgult üle läinud detsentraliseeritud funktsionaalsest juurutamisest suureks kontrolleriks, mis integreerib kõik kereelektroonika põhiajamid, põhifunktsioonid, tuled, uksed, aknad jne. Kerepiirkonna juhtimissüsteemi disain integreerib valgustuse, klaasipuhasti pesuri, keskse ukseluku juhtimise, aknad ja muud juhtnupud, PEPS-i intelligentsed võtmed, energiatarbimise halduse jne. Lisaks lüüsile CAN, laiendatavale CANFD-le ja FLEXRAY-le, LIN-võrgule, Etherneti liidesele ning moodulite arendus- ja disainitehnoloogiale.
Üldiselt kajastuvad eespool nimetatud MCU peamise juhtkiibi juhtimisfunktsioonide töönõuded kere piirkonnas peamiselt arvutus- ja töötlemisjõudluse, funktsionaalse integratsiooni, sideliidese ja töökindluse aspektides. Spetsiifiliste nõuete osas on kere piirkonna erinevate funktsionaalsete rakendusstsenaariumide, näiteks elektriakende, automaatsete istmete, elektrilise tagaluugi ja muude kererakenduste funktsionaalsete erinevuste tõttu endiselt vaja suure efektiivsusega mootorijuhtimist. Sellised kererakendused nõuavad MCU-lt FOC elektroonilise juhtimisalgoritmi ja muude funktsioonide integreerimist. Lisaks on kere piirkonna erinevatel rakendusstsenaariumidel kiibi liidese konfiguratsioonile erinevad nõuded. Seetõttu on tavaliselt vaja valida kere piirkonna MCU vastavalt konkreetse rakendusstsenaariumi funktsionaalsetele ja jõudlusnõuetele ning selle põhjal mõõta põhjalikult toote maksumust, jõudlust, tarnevõimet ja tehnilist teenindust ning muid tegureid.
(2) Toimivusnõuded
Kere pindala juhtimise MCU kiibi peamised võrdlusnäitajad on järgmised:
Jõudlus: ARM Cortex-M4F@ 144MHz, 180DMIPS, sisseehitatud 8KB käskude vahemälu, toetab välklambi kiirendusüksuse täitmisprogrammi 0 ootamist.
Suure mahutavusega krüpteeritud mälu: kuni 512 000 baiti eFlash, toetab krüpteeritud salvestust, partitsioonihaldust ja andmekaitset, toetab ECC-verifitseerimist, 100 000 kustutuskorda, 10 aastat andmete säilitamist; 144 000 baiti SRAM, toetab riistvara pariteeti.
Integreeritud rikkalikud sideliidesed: Toetavad mitmekanalilisi GPIO, USART, UART, SPI, QSPI, I2C, SDIO, USB2.0, CAN 2.0B, EMAC, DVP ja muid liideseid.
Integreeritud suure jõudlusega simulaator: toetab 12-bitist 5 Msps kiiret ADC-d, rööbastelt rööbastele sõltumatut operatsioonvõimendit, kiiret analoogvõrdlusmuundurit, 12-bitist 1 Msps DAC-i; toetab välise sisendi sõltumatut võrdluspingeallikat, mitmekanalilist mahtuvuslikku puutetundlikku nuppu; kiiret DMA-kontrollerit.
Toetab sisemist RC või välist kristallkella sisendit, kõrge töökindluse lähtestamist.
Sisseehitatud kalibreeritud RTC reaalajas kell, toetab liigaasta igavest kalendrit, äratusi, perioodilist äratust.
Toetage suure täpsusega ajaloendurit.
Riistvarataseme turvafunktsioonid: krüpteerimisalgoritmi riistvaraline kiirendusmootor, mis toetab AES, DES, TDES, SHA1/224/256, SM1, SM3, SM4, SM7, MD5 algoritme; välkmälu krüptimine, mitme kasutaja partitsioonihaldus (MMU), TRNG tõeliste juhuslike arvude generaator, CRC16/32 toimimine; kirjutuskaitse (WRP) ja mitme lugemiskaitse (RDP) taseme (L0/L1/L2) tugi; turvalisuse käivitamise, programmide krüptimise allalaadimise ja turvavärskenduste tugi.
Toetage kella rikke jälgimist ja lammutusvastast jälgimist.
96-bitine UID ja 128-bitine UCID.
Väga usaldusväärne töökeskkond: 1,8 V ~ 3,6 V / -40 ℃ ~ 105 ℃.
(3) Tööstuslik muster
Kereosa elektroonikasüsteemid on nii välis- kui ka kodumaiste ettevõtete jaoks alles kasvujärgus. Välismaistel ettevõtetel, nagu BCM, PEPS, uksed ja aknad, istmekontrollerid ja muud ühefunktsioonilised tooted, on sügav tehniline akumulatsioon, samas kui suurtel välismaistel ettevõtetel on lai tootevalik, mis loob aluse süsteemiintegratsiooni toodete tootmiseks. Kodumaistel ettevõtetel on uute energiatarnetega sõidukite kere rakendamisel teatud eelised. Näiteks BYD-l on BYD uues energiatarnetega sõidukis kereosa jagatud vasakule ja paremale alale ning süsteemiintegratsiooni toode on ümber korraldatud ja määratletud. Kereosa juhtimiskiipide osas on mikrokontrollerite peamine tarnija siiski Infineon, NXP, Renesas, Microchip, ST ja teised rahvusvahelised kiibitootjad ning kodumaistel kiibitootjatel on praegu väike turuosa.
(4) Tööstuslikud tõkked
Kommunikatsiooni seisukohast on tegemist traditsioonilise arhitektuuri, hübriidarhitektuuri ja lõpliku sõiduki arvutiplatvormi evolutsiooniprotsessiga. Sidekiiruse muutus ja baasarvutusvõimsuse hinna langus koos kõrge funktsionaalse ohutusega on võtmetähtsusega ning tulevikus on võimalik järk-järgult saavutada baaskontrolleri elektroonilisel tasandil erinevate funktsioonide ühilduvus. Näiteks saab kerepinna kontroller integreerida traditsioonilisi BCM-i, PEPS-i ja pulsatsioonivastaseid funktsioone. Kerepinna juhtkiibi tehnilised takistused on suhteliselt madalamad kui võimsuse ja kokpiti pindala osas ning eeldatakse, et kodumaised kiibid teevad kerepinna valdkonnas läbimurde ning järk-järgult hakkavad neid asendama. Viimastel aastatel on kerepinna esi- ja tagapaigaldusega kodumaiste mikrokontrollerite areng olnud väga hea.
Kokpiti juhtimiskiip
Elektrifitseerimine, intelligentsus ja võrgustumine on kiirendanud autotööstuse elektroonika- ja elektriarhitektuuri arengut domeenikontrolli suunas ning ka kokpit areneb kiiresti sõiduki audio- ja videomeelelahutussüsteemist intelligentse kokpiti suunas. Kokpitis on inimese ja arvuti interaktsiooniliides, kuid olenemata sellest, kas tegemist on eelmise infotainment-süsteemi või praeguse intelligentse kokpiti, vajab see lisaks võimsale arvutuskiirusega SOC-le ka reaalajas töötavat MCU-d, mis suudaks sõidukiga andmesidet hallata. Tarkvarapõhiste sõidukite, OTA ja Autosari järkjärguline populaarsus intelligentse kokpiti puhul muudab kokpiti MCU ressursside nõuded üha suuremaks. See kajastub eelkõige kasvavas nõudluses välkmälu ja muutmälu mahu järele, PIN-koodide arvu nõudluse suurenemine, keerukamad funktsioonid nõuavad tugevamat programmi täitmisvõimet, aga ka rikkalikumat siiniliidest.
(1) Töönõuded
Salongi MCU teostab peamiselt süsteemi energiatarbe haldamist, sisselülitusaja haldamist, võrguhaldust, diagnoosimist, sõiduki andmete interaktsiooni, võtmete haldamist, taustvalgustuse haldamist, heli DSP/FM mooduli haldamist, süsteemi ajahaldust ja muid funktsioone.
Mikrokontrolleri ressursinõuded:
· Põhisagedusel ja arvutusvõimsusel on teatud nõuded, põhisagedus ei ole väiksem kui 100 MHz ja arvutusvõimsus ei ole väiksem kui 200 DMIPS;
· Välkmälu ruum on vähemalt 1 MB, koos koodivälkmälu ja andmetega välkmälu füüsilise partitsiooniga;
· RAM vähemalt 128KB;
· Kõrged funktsionaalse ohutuse taseme nõuded, võib ulatuda ASIL-B tasemeni;
· Toetab mitmekanalilist ADC-d;
· Toetab mitmekanalilist CAN-FD-d;
· Sõiduki reguleerimise klass AEC-Q100 klass 1;
· Toetab veebipõhist uuendamist (OTA), Flash toetab kahe panga teenust;
· Ohutu käivitamise toetamiseks on vaja SHE/HSM-i madala ja kõrgema taseme infokrüptimismootorit;
· PIN-koodide arv ei ole väiksem kui 100 PIN-koodi;
(2) Toimivusnõuded
IO toetab laia pingega toiteallikat (5,5 V ~ 2,7 V), IO-port toetab ülepinge kasutamist;
Paljud signaali sisendid kõiguvad vastavalt toiteallika aku pingele ja võib esineda ülepinget. Ülepinge võib parandada süsteemi stabiilsust ja töökindlust.
Mälu eluiga:
Auto elutsükkel on üle 10 aasta, seega peavad auto mikrokontrolleri programmisalvestusel ja andmesalvestusel olema pikem eluiga. Programmisalvestusel ja andmesalvestusel peavad olema eraldi füüsilised partitsioonid ning programmisalvestust tuleb kustutada harvemini, seega vastupidavus > 10K, samas kui andmesalvestust tuleb kustutada sagedamini, seega peab sellel olema suurem kustutamiskordade arv. Vaadake andmete välklambi indikaatorit vastupidavus > 100K, 15 aastat (<1K), 10 aastat (<100K).
Sidebussi liides;
Sõiduki bussi kommunikatsioonikoormus muutub üha suuremaks, mistõttu traditsiooniline CAN CAN ei vasta enam kommunikatsioonivajadusele. Kiire CAN-FD bussi nõudlus muutub üha suuremaks ja CAN-FD toetamine on järk-järgult muutunud MCU standardiks.
(3) Tööstuslik muster
Praegu on kodumaiste nutikate kabiinidega mikrokontrollerite osakaal endiselt väga madal ning peamised tarnijad on endiselt NXP, Renesas, Infineon, ST, Microchip ja teised rahvusvahelised mikrokontrollerite tootjad. Mitmed kodumaised mikrokontrollerite tootjad on juba paigutusega tegelenud, kuid turu tulemused on veel näha.
(4) Tööstuslikud tõkked
Intelligentse kabiiniga autode reguleerimise tase ja funktsionaalse ohutuse tase on suhteliselt madalad, peamiselt tänu oskusteabe kogunemisele ning pideva tootearenduse ja täiustamise vajadusele. Samal ajal, kuna kodumaistes tehastes pole palju mikrokontrollerite tootmisliine, on protsess suhteliselt mahajäänud ja riikliku tootmise tarneahela saavutamine võtab aega, kulud võivad olla kõrgemad ja konkurentsisurve rahvusvaheliste tootjatega on suurem.
Koduse juhtimiskiibi rakendamine
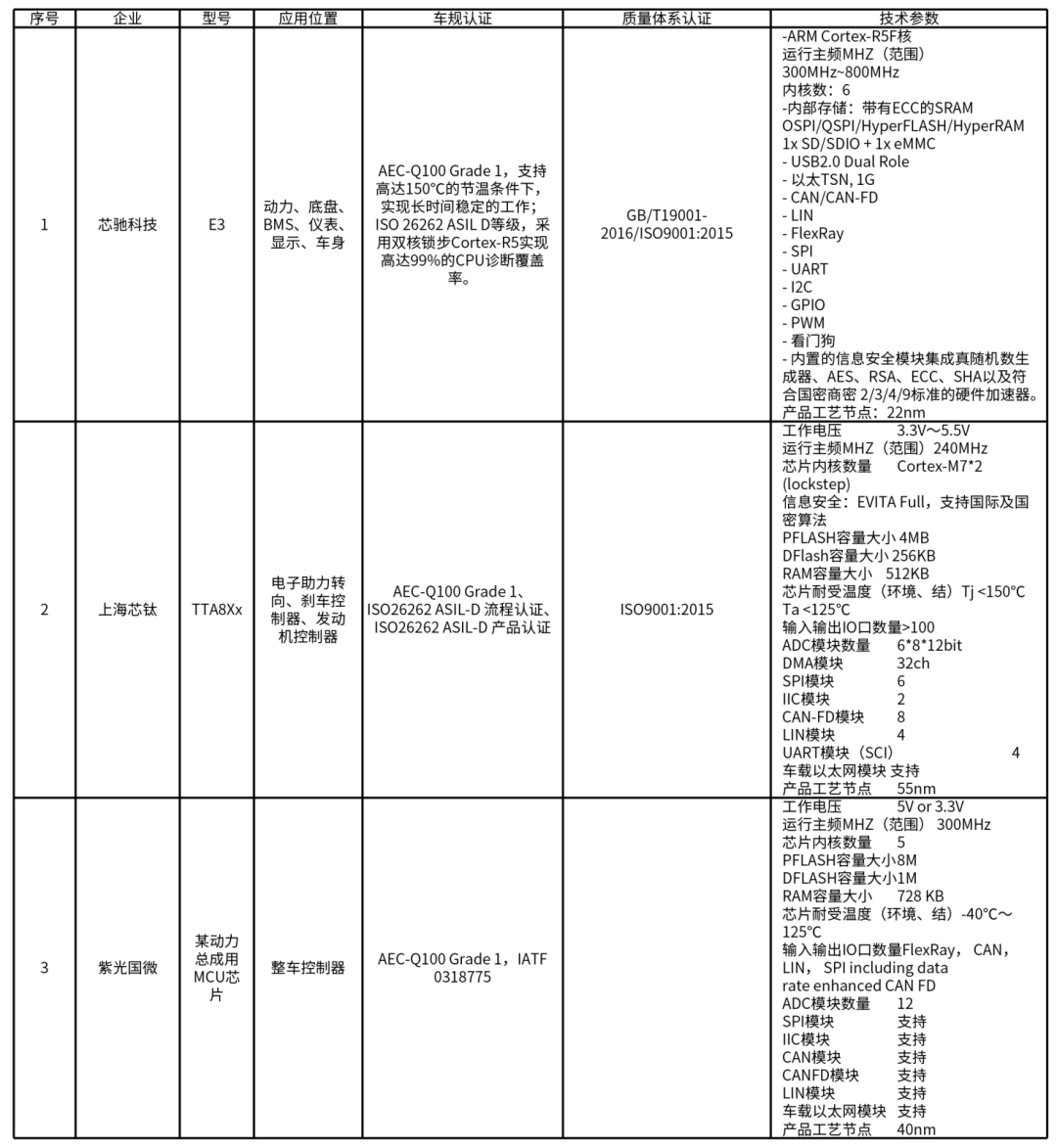
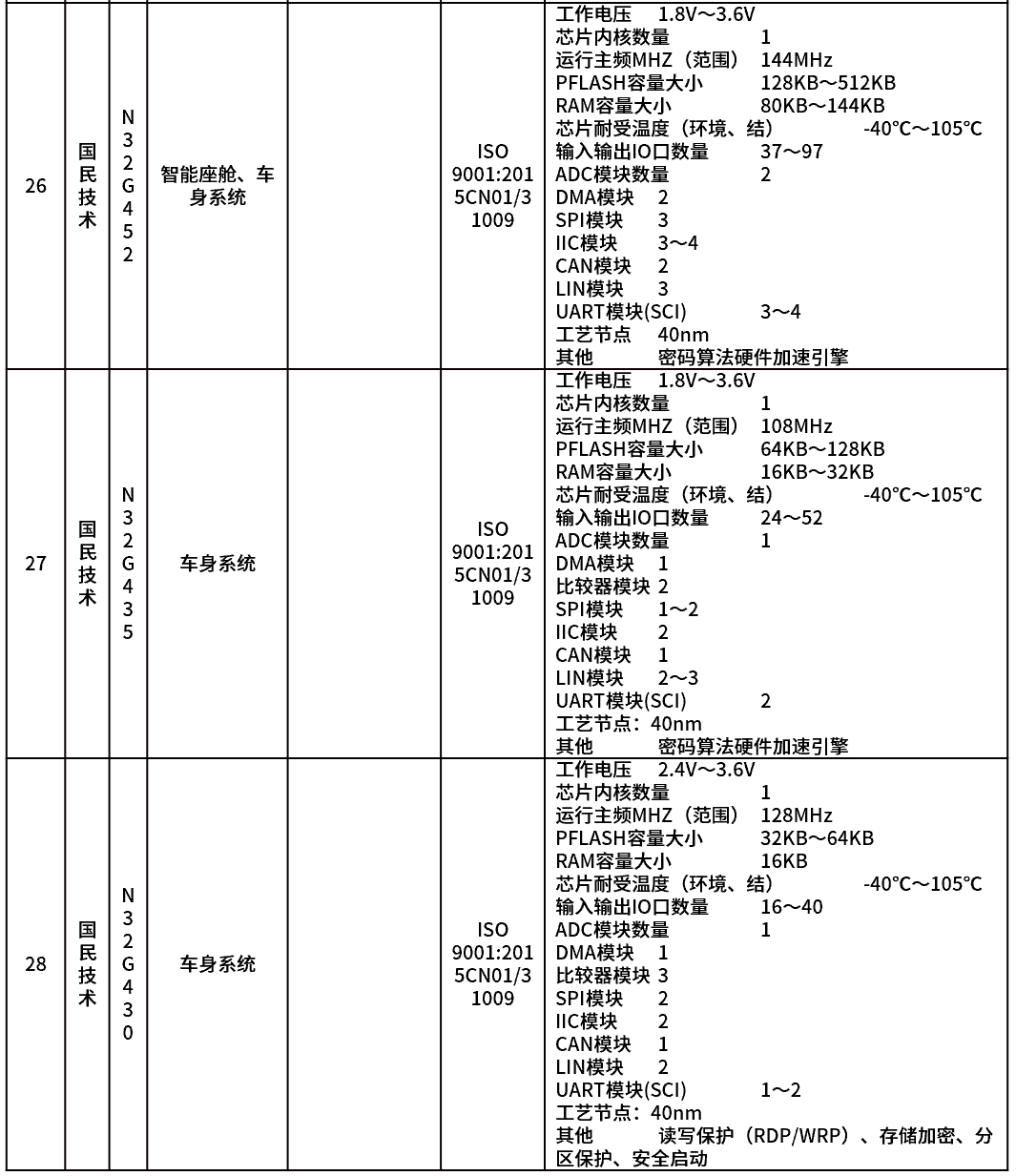
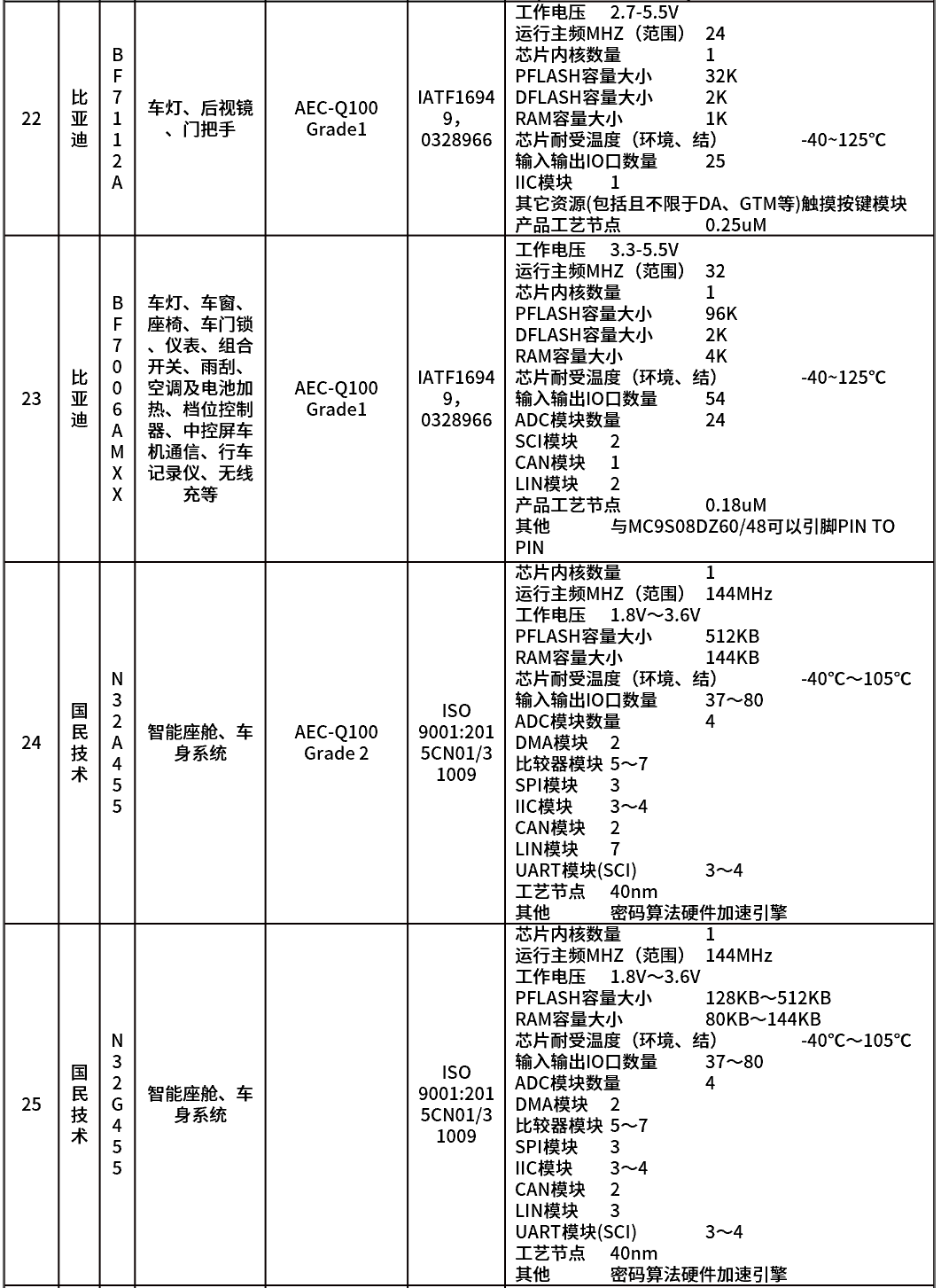
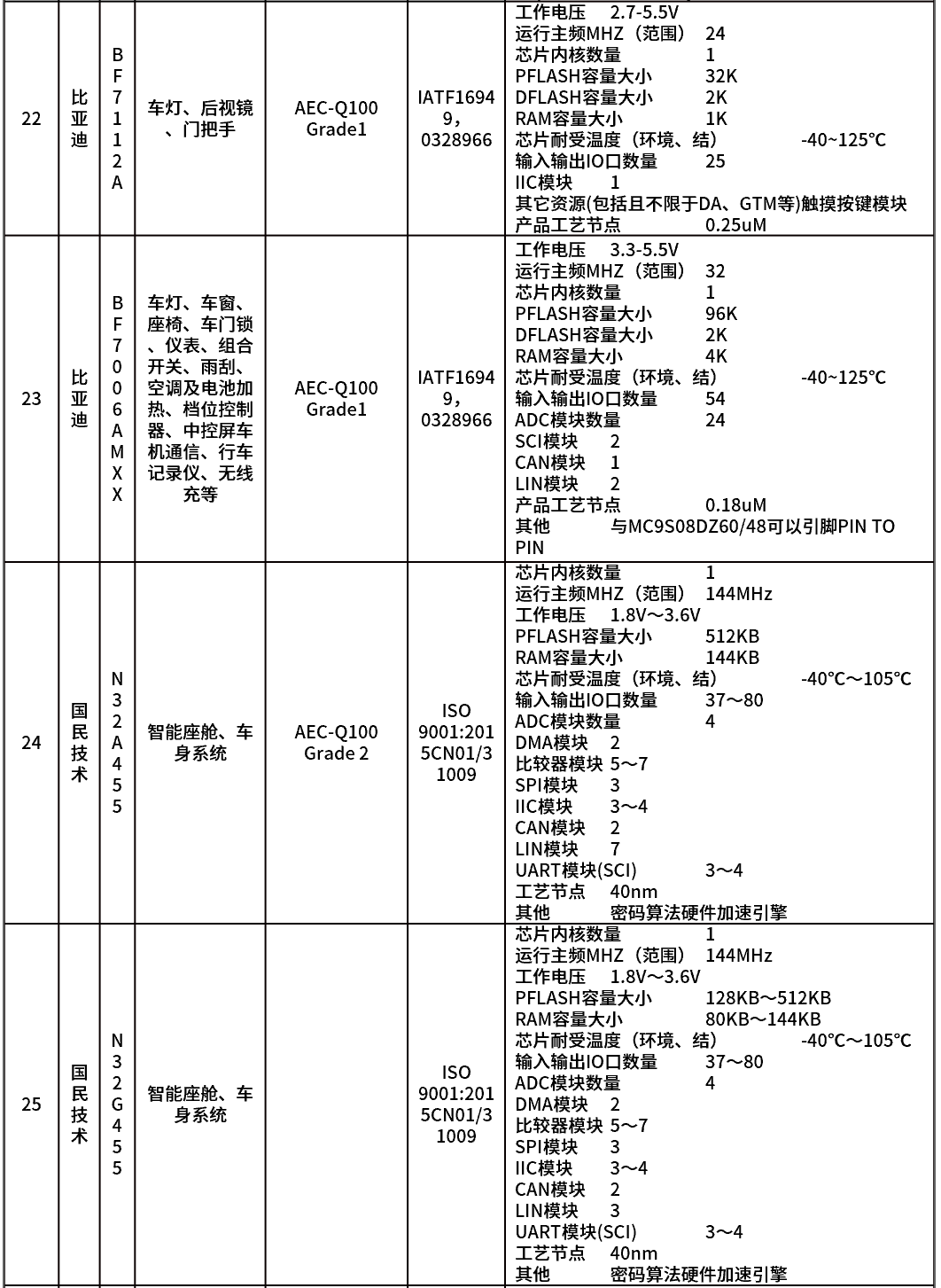
Autode juhtimiskiibid põhinevad peamiselt autode mikrokontrolleritel. Kodumaised juhtivad ettevõtted nagu Ziguang Guowei, Huada Semiconductor, Shanghai Xinti, Zhaoyi Innovation, Jiefa Technology, Xinchi Technology, Beijing Junzheng, Shenzhen Xihua, Shanghai Qipuwei, National Technology jne omavad kõigil autodele sobivaid mikrokontrollerite tootejärjestusi, mis on välismaiste hiiglaste toodete etaloniks ja põhinevad praegu ARM-arhitektuuril. Mõned ettevõtted on läbi viinud ka RISC-V arhitektuuri uurimis- ja arendustegevust.
Praegu kasutatakse kodumaist sõiduki juhtimisdomeeni kiipi peamiselt autode esilaadimise turul ning seda on rakendatud autodel kere ja meelelahutuse valdkonnas, samas kui šassii, jõuallika ja muudes valdkondades domineerivad seda endiselt välismaised kiibihiiglased nagu stmicroelectronics, NXP, Texas Instruments ja Microchip Semiconductor ning vaid vähesed kodumaised ettevõtted on realiseerinud masstootmise rakendusi. Praegu annab kodumaine kiibitootja Chipchi 2022. aasta aprillis välja ARM Cortex-R5F-il põhinevaid suure jõudlusega juhtimiskiibi E3-seeria tooteid, mille funktsionaalne ohutustase ulatub ASIL D-ni, temperatuuritase toetab AEC-Q100 1. klassi, protsessori sagedus on kuni 800 MHz ja millel on kuni 6 protsessori südamikku. See on olemasoleva masstootmises oleva sõiduki gabariitide MCU kõrgeima jõudlusega toode, täites lünga kodumaisel tipptasemel kõrge ohutustasemega sõiduki gabariitide MCU turul. Suure jõudluse ja töökindlusega toodet saab kasutada BMS-is, ADAS-is, VCU-s, juhtmevabas šassiis, instrumentides, HUD-is, intelligentsetes tahavaatepeeglites ja muudes sõiduki juhtimise põhivaldkondades. E3 on tootekujunduses kasutusele võtnud üle 100 kliendi, sealhulgas GAC, Geely jne.
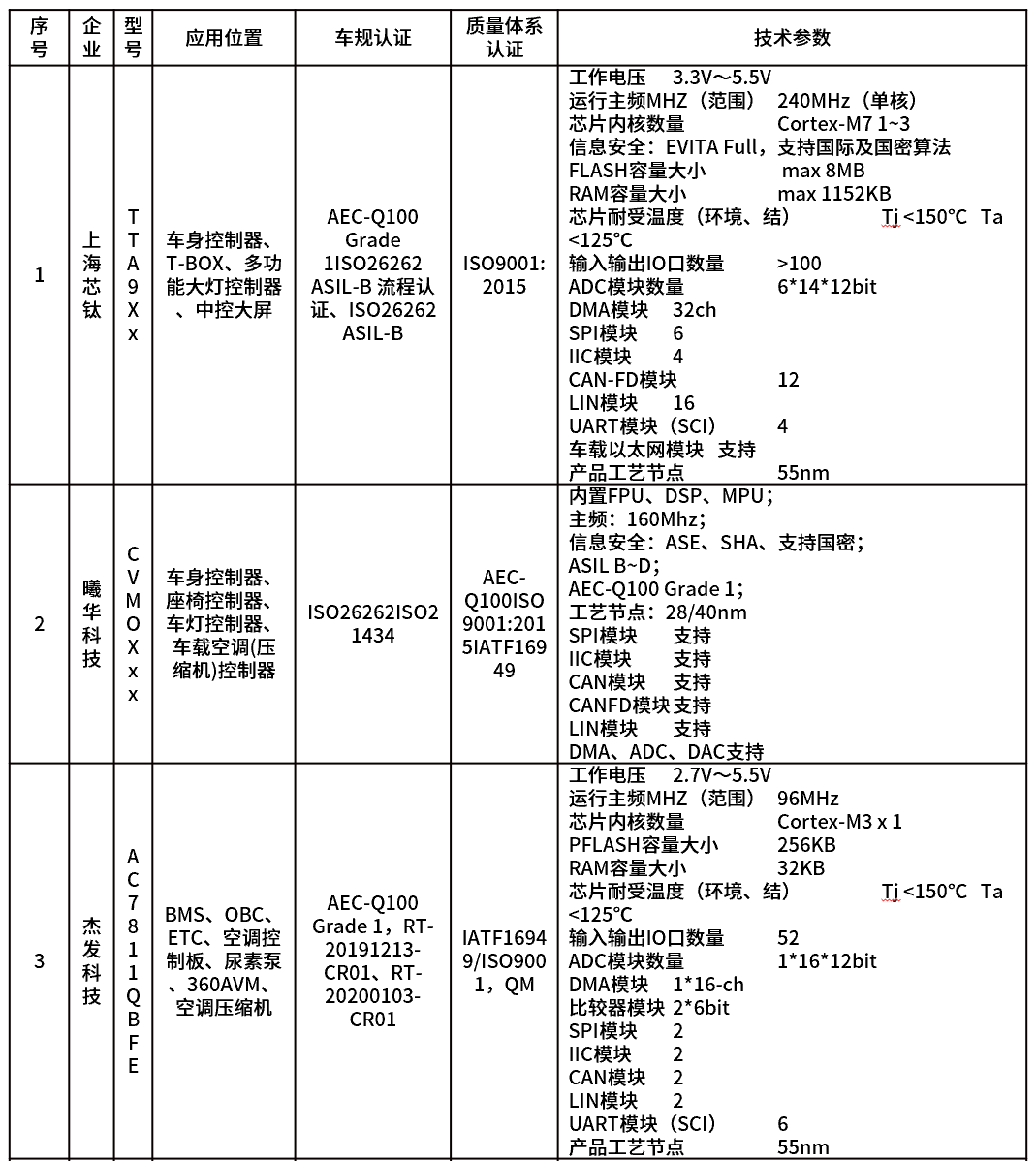
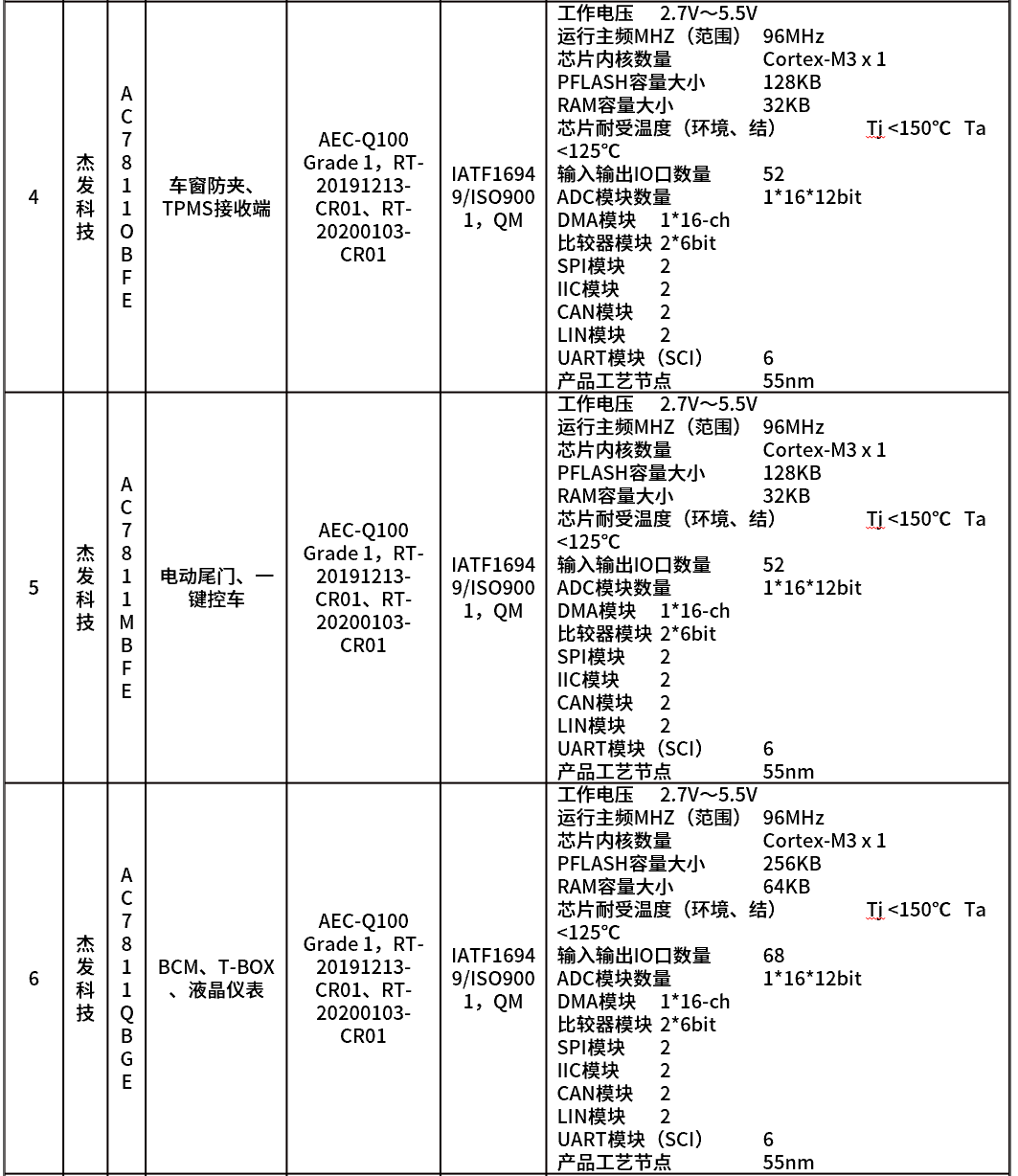
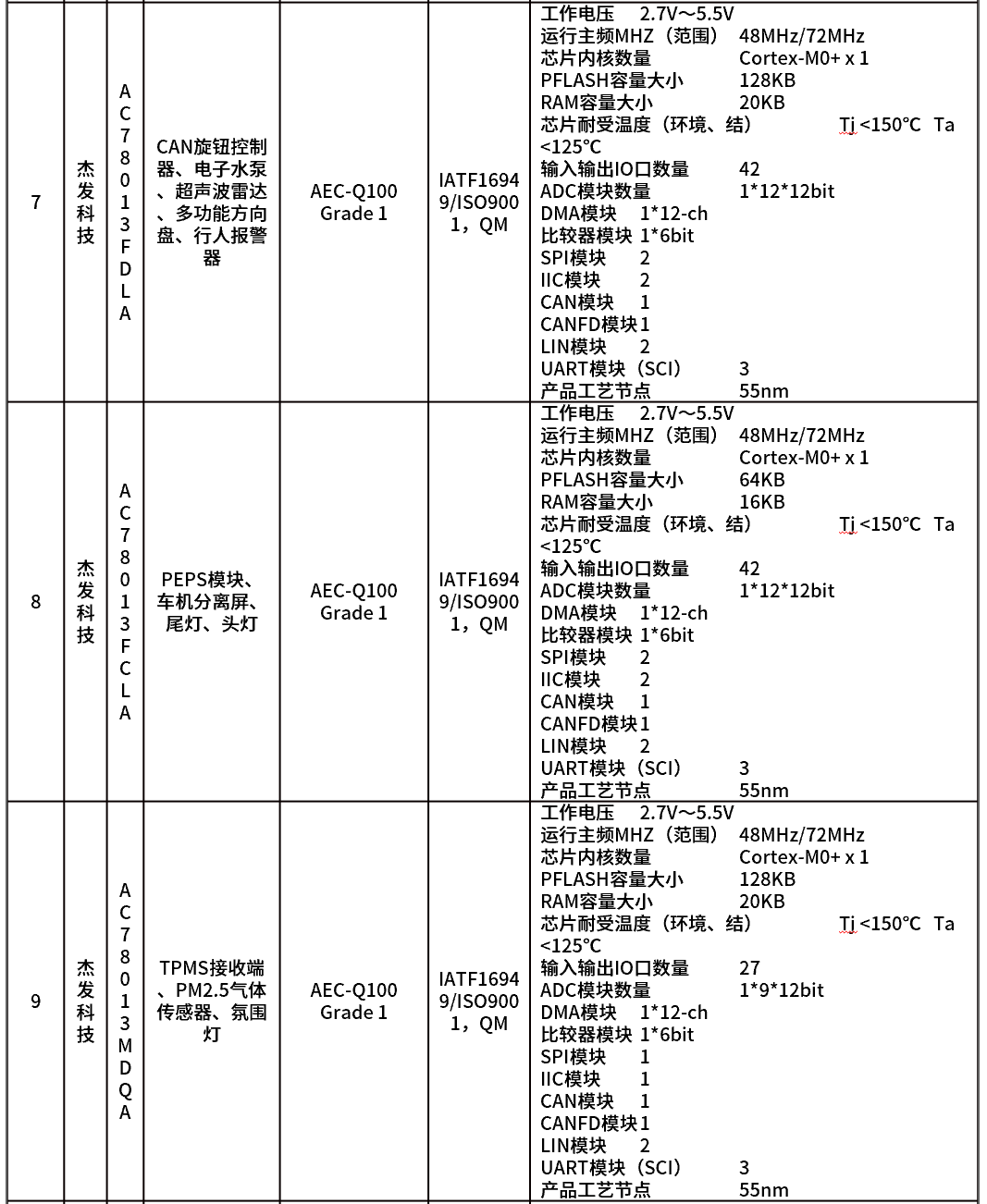
Kodumaiste kontrollerite põhitoodete rakendamine
Postituse aeg: 19. juuli 2023





